E-Yantra
A nation wide robotics competition organised by IIT-B. I participated in two consecutive years 2018-19 and 2019-20. Being a six month long competition, I learnt a lot of new things through and cleared stage 2 of the competition. The competition consisted of 2 stages. The first stage had some tasks which were useful to complete stage 2. After elimination in stage 1 , each team (of 4 members) is given a theme/problem statement. The problem statement involved solving some task through a robot.
Eyantra 2018-19
Stage 1:
- Coded a neural network from scratch using PyTorch Tensors. Achieved 96% accuracy on MNIST dataset.
Stage 2:
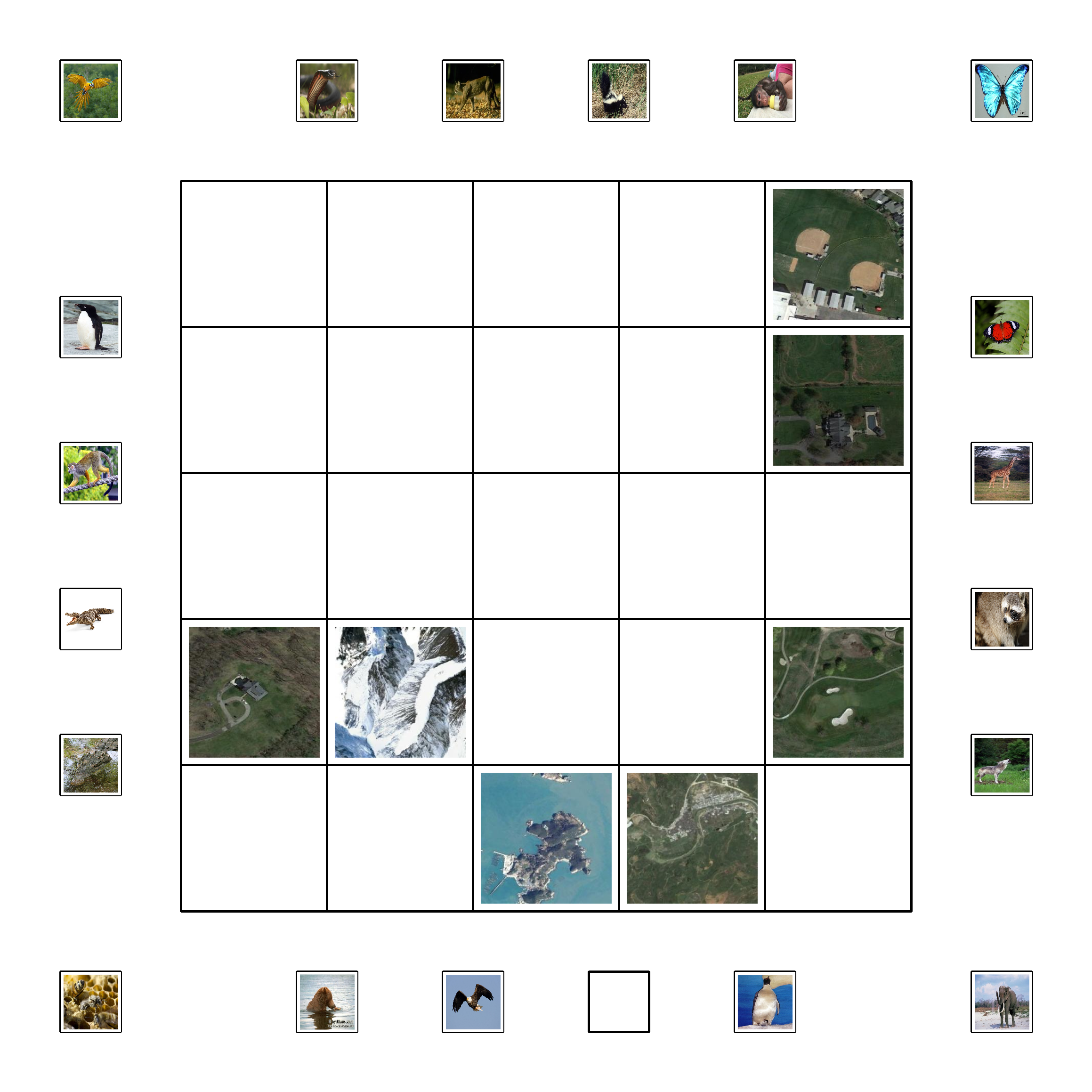
- Trained two CNNs to classify images of animals (over 30 classes) and habitats (over 20 classes). Following tasks were to be completed during one run :
- Make predictions of animals and habitats over a top view image of the arena.
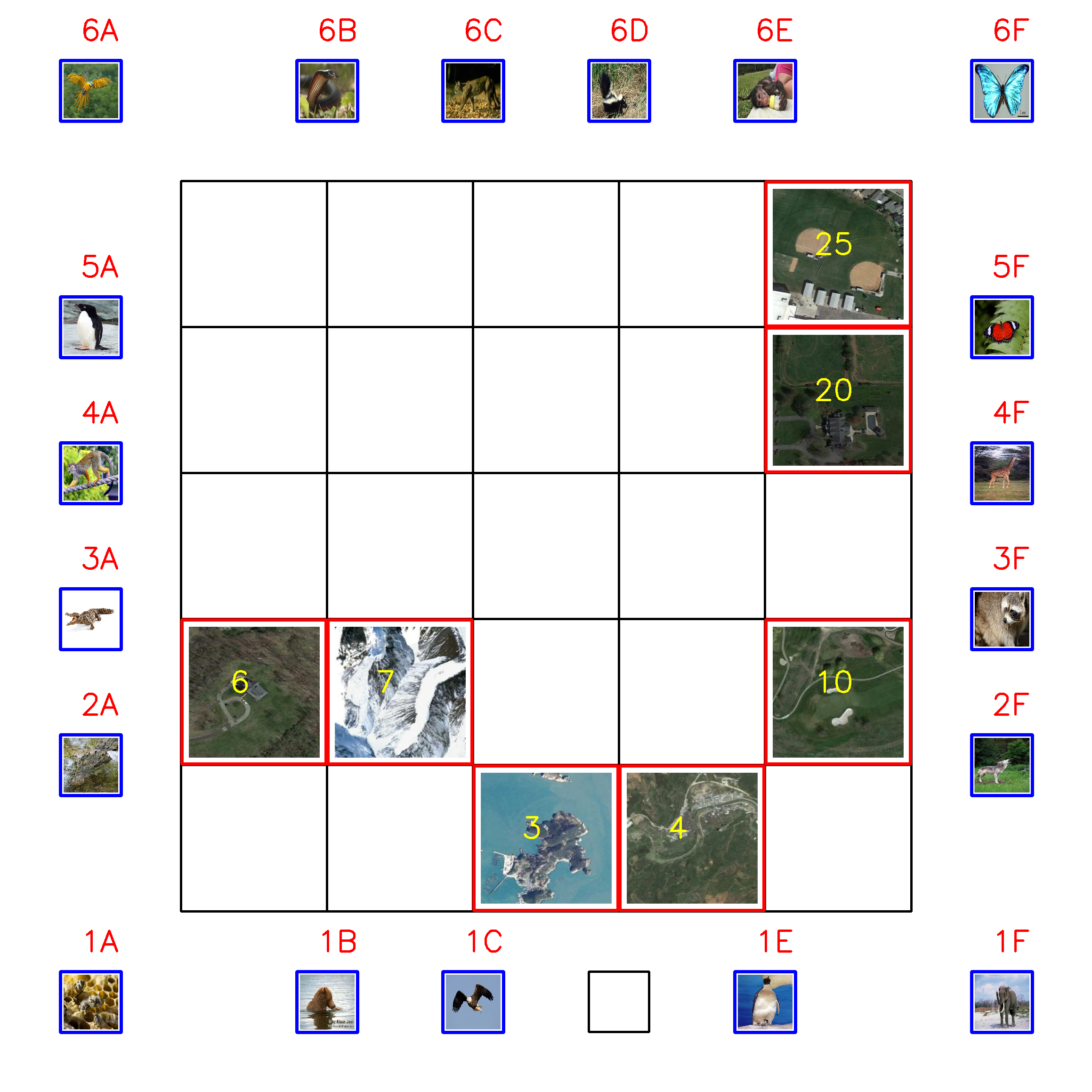
- Identify the position of each animal and habitat and create a mapping of animal-habitat.
- Transfer this information to the robot through serial communication.
- The white line following robot goes to each animal position, picks up a small box representing the animal, goes to the corresponding habitat and deposits the box.
- Robot used was Firebird V with an AtMEGA 2560 microcontroller.
Eyantra 2019-20
Stage 1:
- Some routine tasks on image processing (OpenCV).
- Processed a video to deblur individual frames using the Weiner filter and a Point Spread Function (PSF). We had to detect an Aruco marker in the deblurred video.
Stage 2:
- We had to detect two coin shaped markers placed on the arena using contour detection. The positions of the markers were communicated to the robot wirelessly through XBee modules.
- In this stage we had to build the whole chassis of the robot.
- We had to develop a striking mechanism in the robot to strike the coin shaped markers.
- The microcontroller given was Arduino UNO.
Though my team didn’t qualify for the finals, I learnt a lot of new things in a very short period of time. Things like designing the chassis of robot, developing path finding algorithms, endless hours of debugging, coding everything in Embedded C, was a challenge on its own.
Examples of some tasks
- Here, an example input image and output image of an arena are shown. Output image has positions of all detected animals and habitats overwritten on it.
- Here, another example arena is shown. The task was to find the angle between the two markers using an overhead webcam.
